国立研究開発法人情報通信研究機構(NICT)、国立研究開発法人科学技術振興機構(JST)、内閣府政策統括官(科学技術・イノベーション担当)は2019年1月24日、ドローン同士がニアミスを自律的に回避する実験に成功したと発表しました。
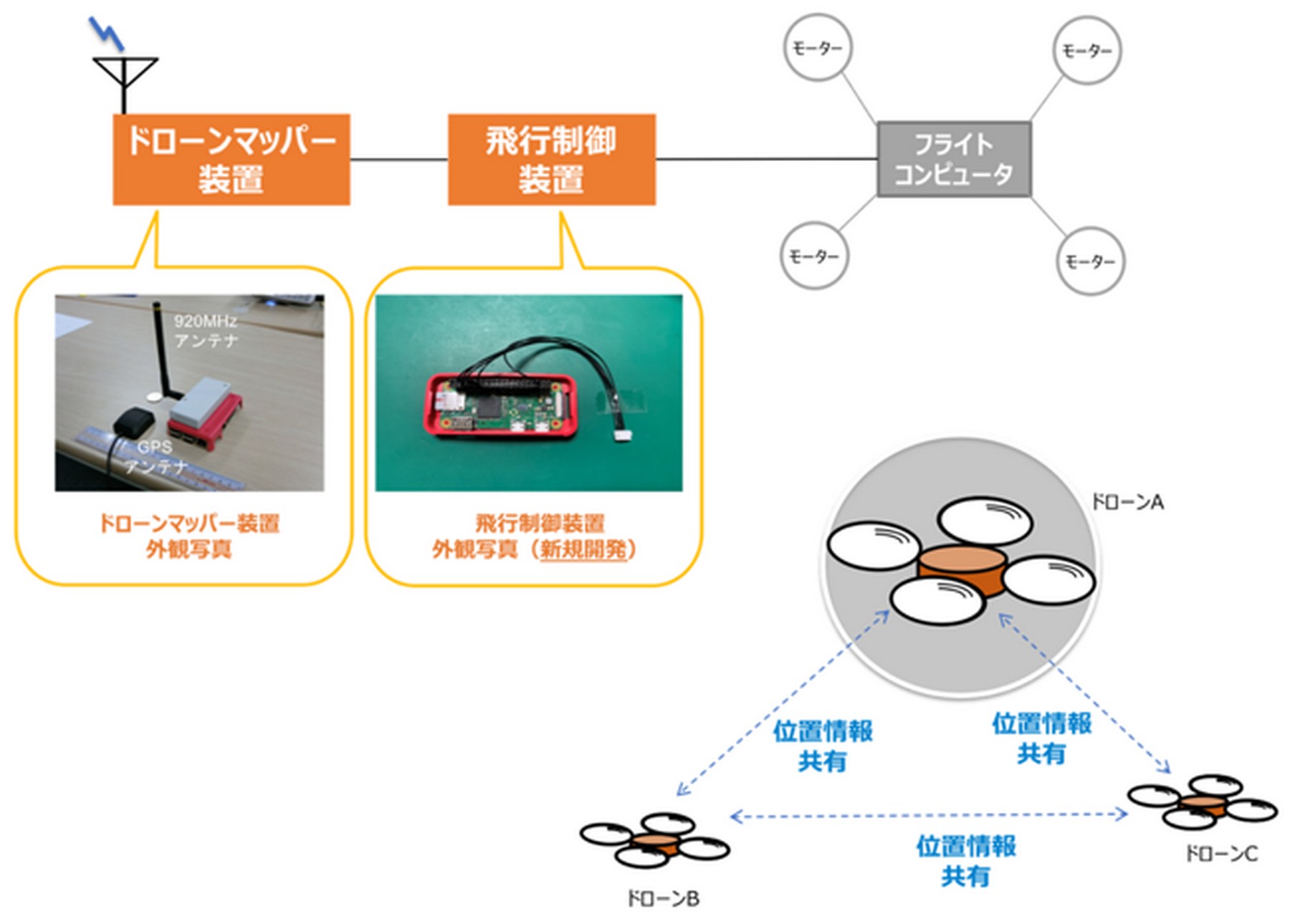
この実験は、内閣府 総合科学技術・イノベーション会議が主導する革新的研究開発推進プログラム(ImPACT)タフ・ロボティクス・チャレンジの一環として行われました。ドローン間の直接通信により、位置情報を共有するシステム「ドローンマッパー」という技術を使用しました。
これまでドローンを目視外で飛行させる場合には、ドローンと操縦者との間の通信を行いながら、あらかじめプログラムされた飛行経路や飛行方法に従って、自動で飛行させる飛行制御が用いられてきました。しかし、従来の飛行制御方法では、他のドローンや有人航空機などの接近への対応が困難であるなどの課題がありました。
この課題に対し、今回開発した技術では、ドローンマッパーとドローンのフライトコンピュータを連携させることで対応しました。これにより、操縦者を介さずに、ドローン同士が互いに直接共有される位置情報から周辺のドローンの位置を把握し、ドローン自体が自動で飛行制御することができるようになりました。
実験は、2018年12月17日と18日に埼玉県秩父市のグランドで行われました。そして、最大3機のドローンがそれぞれの目的地に向かう際、自動で接近を検知し、ニアミスを回避した後、予定の飛行経路に戻り、最終目的地まで到達することを確認しました。
NICTは、今回の開発により、ドローン間の直接通信が、目視外飛行環境におけるドローンの飛行制御と安全運用に寄与できる見通しが得られたとコメントしています。
(画像引用:https://www.nict.go.jp/press/2019/01/24-1.html)